RNN
RNN,循环神经网络,是一种专门处理序列数据的神经网络,其基本结构如图所示:
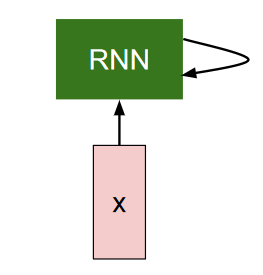
RNN的输入是序列数据x与上轮计算输出的隐藏状态。假设RNN的隐藏层计算为fw,隐藏状态为h,将其计算图展开,可以得到:
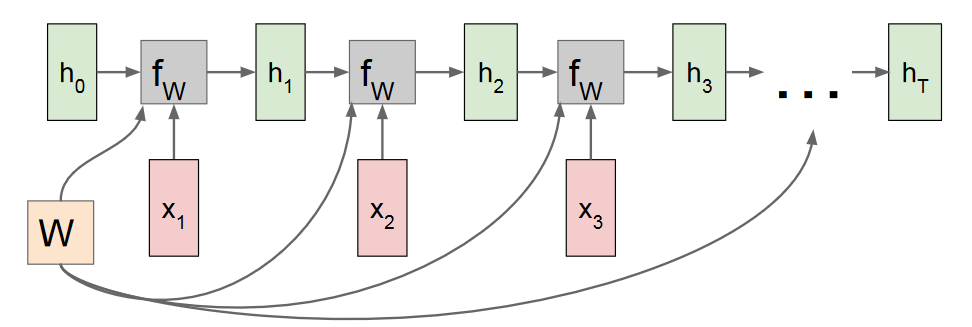
值得注意是,每次隐藏层计算所需要的参数W,都是一样的,也就是所谓的共享参数。
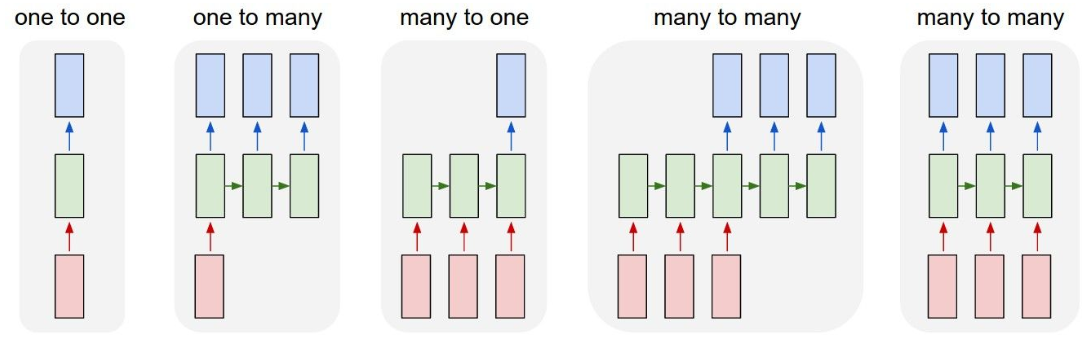
RNN根据输入输出是不是变长, 可以分为下图中的右边四种。one-to-many比如是image captioning, many-to-one比如是sentiment classification, many-to-many比如是seq2seq,最后一种是video classification。
RNN的计算
拿一个简单的rnn拿做例子,讲讲rnn的前向与后向计算。
记隐藏状态为s,s = tanh(U*x + W * s),a=f(a), y=softmax(a),loss为E,我们拿第三个time step举例。E对V的偏导数为:
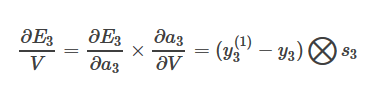
其中对softmax的求导可参考这里。
E对W的偏导数较为复杂,因为求s3对W的偏导数时,而s3是s2的函数,s2也是W的函数。
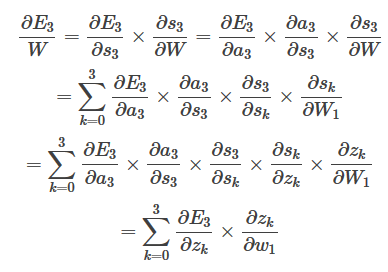
值得注意的是,在这里,存在一个连乘

因而当序列过长时,必定造成梯度消失问题。而对于RNN时刻T的输出,是时刻t=1,…,T-1的输入综合作用的结果,也就是说更新模型参数时,要充分利用当前时刻以及之前所有时刻的输入信息。但是如果发生了梯度消失问题,就会意味着,距离当前时刻非常远的输入数据,不能为当前模型参数的更新做贡献,所以在RNN的编程实现中,才会有“truncated gradient”这一概念,只利用较近的时刻的序列信息,把那些“历史悠久的信息”忽略掉了。
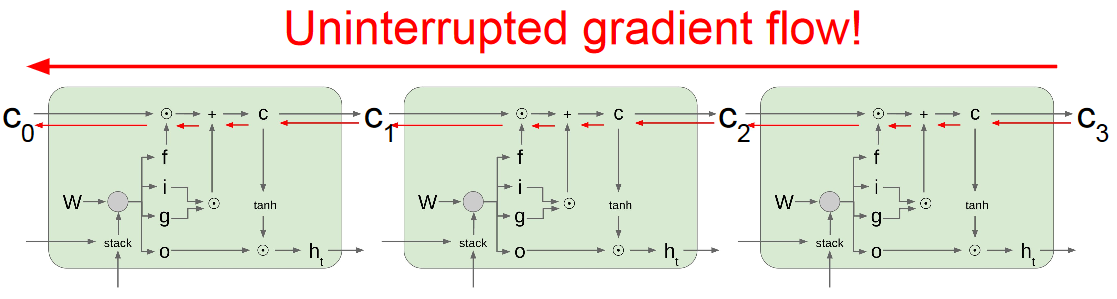
RNN的后向计算,从图的角度来理解的话,看下图的红色线,需要经过多次W,即需要多次乘上W,非常容易导致梯度爆炸或梯度消失。

我们可以通过梯度裁剪(gradient clipping)解决梯度爆炸,而梯度消失问题,我们需要用到LSTM。
LSTM
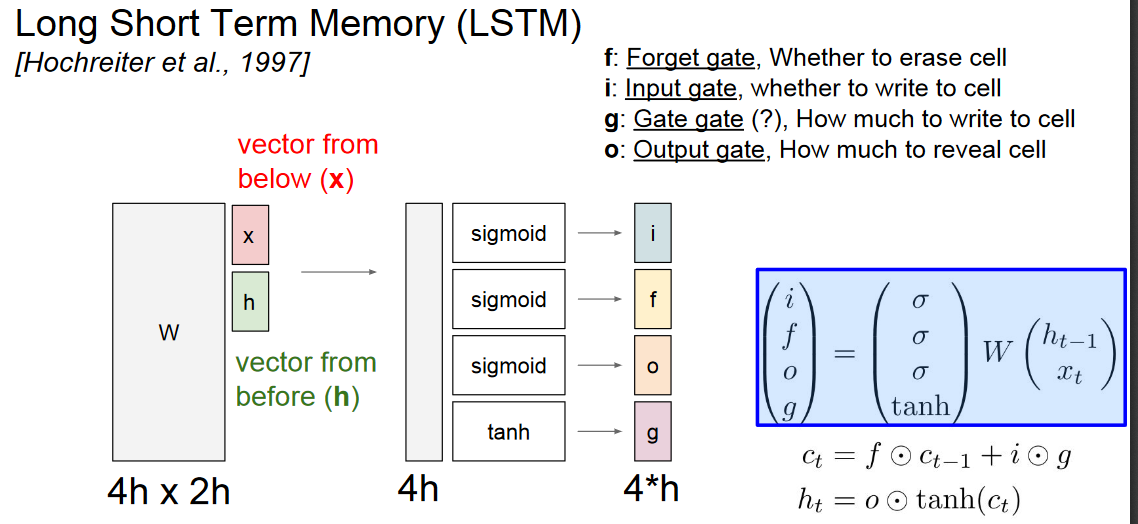
LSTM可由上图解释,通过4个门,来控制更新量。相比普通的rnn,在LSTM中,迭代的值有两个,ct和ht,f控制ct的遗忘程度,而i和g控制ct的更新程度,o则控制ct到ht的表达程度。上图其实已经是一个比较有总结性的图,由于i,f,o,g都需要一个wx,wh分别乘上x,h,即有4组wx,wh,那么就可以组成一个4*2的大矩阵W,一次性同时计算(TensorFlow的LSTM就是这么实现的)。
LSTM的图计算可以由下图表示:
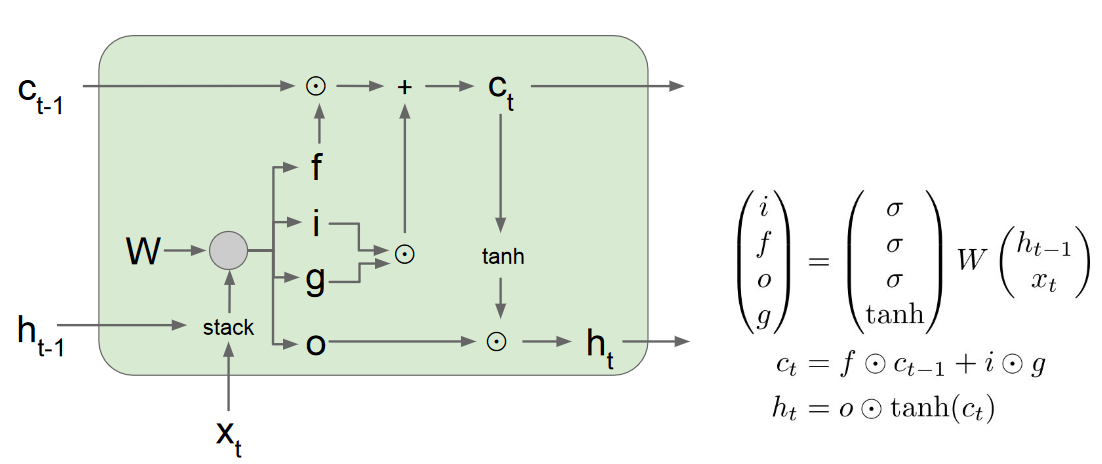
那么为何LSTM能解决梯度消失问题呢?主要是由于:
- 相比普通RNN的在隐藏状态之间的求偏导需要矩阵相乘,在lstm中是大量的element-wise相乘
- ct之间,存在一条梯度的高速通道,类似于resnet
Seq2Seq
seq2seq由encoder和decoder两部分组成,其中encoder部分可以看做是many-to-one,而decoder则是one-to-many。
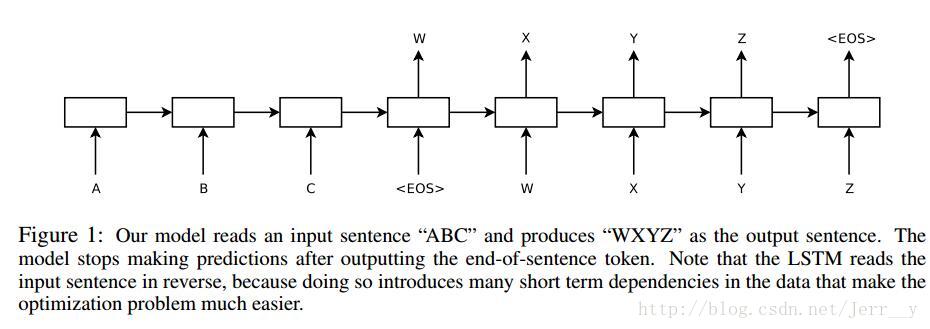
如图所示,将A,B,C通过rnn编码成W,W再通过rnn,解码成X,Y,Z。
Attention
从seq2seq角度来看,Attention是为了解决传统seq2seq长输入序列问题。
传统seq2seq会将输入序列不论长短,通过rnn编码成一个固定长度的状态向量(state vector),这就导致,如果输入序列过长,那么这个向量难以保留全部的必要信息,导致后续解码时输入信息不足,模型性能差。
Attention机制其实很简单,既然只使用最后一个状态向量会造成信息损失,那么干脆把之前的状态向量都用好了,而attention机制起的作用就是选择恰当的状态向量。在大部分论文中,Attentions的实现是通过训练一个模型,输入是所有的encoder阶段的状态向量,输出是一个权重向量,代表各个输入的权重,权重越大,代表该输入越重要。 更生动形象的图片可以参考这里。
额外的RNN代码
这是一个简单的RNN前向后向代码实例
def lossFun(inputs, targets, hprev):
"""
inputs,targets are both list of integers.
hprev is Hx1 array of initial hidden state
returns the loss, gradients on model parameters, and last hidden state
"""
xs, hs, ys, ps = {}, {}, {}, {}
hs[-1] = np.copy(hprev)
loss = 0
# 前向计算
for t in xrange(len(inputs)):
# 对输入做one-hot encoding
xs[t] = np.zeros((vocab_size,1))
xs[t][inputs[t]] = 1
# 计算隐藏层
hs[t] = np.tanh(np.dot(Wxh, xs[t]) + np.dot(Whh, hs[t-1]) + bh)
# 计算输出层
ys[t] = np.dot(Why, hs[t]) + by
# softmax
ps[t] = np.exp(ys[t]) / np.sum(np.exp(ys[t]))
# cross-entropy loss,把真实目标的预测值拿出来求-log
loss += -np.log(ps[t][targets[t],0])
# 后向计算
dWxh, dWhh, dWhy = np.zeros_like(Wxh), np.zeros_like(Whh), np.zeros_like(Why)
dbh, dby = np.zeros_like(bh), np.zeros_like(by)
dhnext = np.zeros_like(hs[0])
for t in reversed(xrange(len(inputs))):
# 这里是softmax求导,p-y
dy = np.copy(ps[t])
dy[targets[t]] -= 1
dWhy += np.dot(dy, hs[t].T)
dby += dy
dh = np.dot(Why.T, dy) + dhnext # backprop into h
dhraw = (1 - hs[t] * hs[t]) * dh # backprop through tanh nonlinearity
dbh += dhraw
dWxh += np.dot(dhraw, xs[t].T)
dWhh += np.dot(dhraw, hs[t-1].T)
dhnext = np.dot(Whh.T, dhraw)
for dparam in [dWxh, dWhh, dWhy, dbh, dby]:
np.clip(dparam, -5, 5, out=dparam) # clip to mitigate exploding gradients
return loss, dWxh, dWhh, dWhy, dbh, dby, hs[len(inputs)-1]
[cs231n](cs231n.stanford.edu/slides/2017/cs231n_2017_lecture10.pdf)